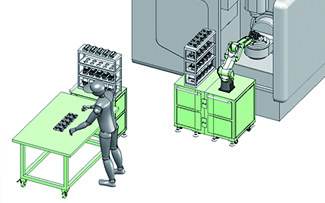
Contribute the improving of production efficieny by offering our standardized items.
![]()
![]()
E-1403
![]()

* Wmv movie data can be downloaded. 'Windows Media Player is required to play this movie.
If you need to install this software, follow the instructions at the website below and download.
| Order No. |
Model No. | Length | Width | Torque N/m |
Clamping Force kN |
Weight kg |
Drawing | Product BOX |
CAD | Production | Stock Status |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 150466 | NE75-130-2B1 | 130 | 76 | 100 | 20 | 3.5 | View | Add | DATA | Stock Item | Contact |
| 150467 | NE75-170-2B1 | 170 | 76 | 100 | 20 | 4.2 | View | Add | DATA | Stock Item | Stock〇 |
| 151682 | NE125-230-4B | 230 | 126 | 120 | 25 | 9.5 | View | Add | DATA | Discontinued | Contact |
| 159121 | NE125-230-4B1 | 230 | 126 | 120 | 25 | 9.5 | View | Add | DATA | Stock Item | Stock△ |
Enter Model No./Product name/relative keywords

Product information can be recorded temporarily while browsing the page
![]()
Wakasugi-cho 25, Gifu-shi, Gifu 500-8743
TEL.058-273-6521 FAX.058-278-0220
![]()
Copyright © NABEYA Co.,Ltd. All Rights Reserved.